
Videos: Virtueller Fahrversuch für ADAS und autonomes Fahren
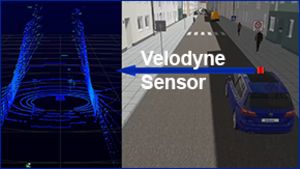
Virtuelles Fahrzeug, Verkehr und Lidar Sensor Simulation in DYNA4, für die Funktionsentwicklung von ADAS und AD.
DYNA4 und ROS in der Funktionsentwicklung für autonomes Fahren. Beispiel mit Lidar- und Kamerasignalen im Parkhaus.
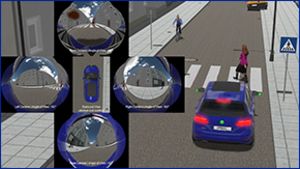
Kamerabilder mit ultraweitem Öffnungswinkel für die Entwicklung von Surround-View-Algorithmen.

Unity's Windridge Umgebung für virtuelle Testfahrten mit DYNA4 und stochastischem SUMO Verkehr.
Virtuelle Testfahrt auf OpenDRIVE Autobahn mit DYNA4 und SUMO Verkehr bei variablen Umgebungsbedingungen.
KA-RaceIng: Entwicklung des Driverless-Fahrzeugs mit der Fahrzeug- und Umgebungssimulation DYNA4 und ROS.

Virtuelle Testfahrten bei Tag und bei Nacht, Einfahrt in einen Tunnel bei unterschiedlichen Lichtbedingungen

Physikalisch basierte Sensorsimulation: Lidar, Ultraschall und Kamera-Sensorik für die Entwicklung von ADAS/AD-Funktionen

Entwicklung von Car2X-Funktionen in einer virtuellen Umgebung, inkl. Fahrzeug, Umgebung, Sensoren.
Funktionsentwicklung von automatisiertem Einparken in einer virtuellen Umgebung, inkl. Fahrzeug, Parkhaus, Sensoren.

Test Ihrer Funktionen für ADAS und autonomes Fahren in einer virtuellen Welt, z. B. mit Stadtverkehr.
Szene mit Kind und Ball für virtuelles Testen des Notbremsassitenten/ AEB mit vordefinierten Manövern.

NCAP-Test des Notbremsassistenten mit vordefinierten Manövern. Fahrendes, stehendes und bremsendes Fahrzeug.