
TESIS Simulationstechnologie: Flexibilität und Standard-Schnittstellen
DYNA4 3.1
DYNA4 3.1 bietet echten Multi-Ego-Betrieb, 3D-Animation in 4K, ROS und SUMO Integration, NOx-Optimierung am HiL.

ADAS Entwicklung mit DYNA4 und ROS
Closed-Loop Fahrzeug-, Sensor und Umfeldsimulation für die ADAS & AD-Funktionsentwicklung in ROS.

SUMO-DYNA4-Integration
Integration von DYNA4 und SUMO Verkehrssimulation für virtuelle Fahrversuche in komplexem Umgebungsverkehr.

Sensorsimulation
Physikalische Modellierung von Ultraschall-, Lidar-, Kamera- und Radarsensoren in der DYNA4 Fahrzeug- und Umweltsimulation.
Vernetztes Fahren und C2X
Simulationsbasierte Entwicklung automatisierter und vernetzter Fahrzeuge sowie von C2X-Funktionen

OpenDRIVE Straßen für virtuelle Testfahrten
Fahren auf OpenDRIVE Straßen ohne Konvertierung, für ADAS/AD-Entwicklung und Fahrdynamik-Tests.

Valet Parking
Virtuelles Fahrzeug, Sensoren und Parkhäuser zur Entwicklung von automatisierten Parkfunktionen am PC oder HiL.

3D-Welt für die simulations- basierte Funktionsentwicklung
Testen Sie Ihre ADAS/AD Funktionen nahtlos integriert in der DYNA4-Umgebung, verfügbar von MiL, SiL bis HiL
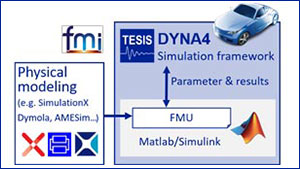
FMU Integration in DYNA4
FMUs werden nahtlos in DYNA4 integriert, wodurch Sie Parametrierung und Automatisierung im DYNA4-Framework nutzen können.

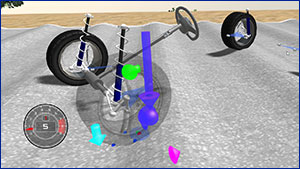
Virtueller Reifenprüfstand für die Fahrzeugsimulation
Mit dem virtuellen Reifenprüfstand generieren Sie automatisiert validierte Reifen für DYNA4 Fahrdynamik-Untersuchungen.

Suspension Toolbox für validierte Achsen
Automatisierte Achsgenerierung aus Daten von K&C Messungen oder MBS-Simulationen
DYNA4 2.8
In DYNA4 2.8 wird das OpenDRIVE Standard-Straßenformat umfassend unterstützt. Fahrzeug-Achsen und Reifen lassen sich automatisiert generieren und validieren.
Neuronale Netze für semi-aktive Fahrwerksregelung
Simulationsbasierte Analyse des Reglerverhaltens einer semi-aktiven Fahrwerksregelung, die auf neuronalen Netzen beruht.

FTire Reifenmodell in DYNA4
Das detaillierte FTire Reifenmodell kann vollintegriert in der DYNA4-Fahrzeug- Simulation incl. 3D-Animation genutzt werden.

HiL-System mit Vector CANoe
TESIS und Vector Informatik stellen ein smartes, skalierbares und effizient nutzbares Hardware-in-the-Loop-System vor.
TMeasy: Universelles Reifen- Modell für Fahrdynamik-Tests
TMeasy ist ein einfach nutzbares Reifenmodell für Handling-Untersuchungen mit realistischen Kräften auch bei niedrigen Geschwindigkeiten und im Stillstand.

Teamübergreifende Zusammenarbeit
Durch Versionierung mit Subversion wird rollen- und rechtebasierte Zusammenarbeit in der Simulation ermöglicht.

dSpace Scalexio HiL mit DYNA4
Für Steuergerätetests mit offener, modularer Fahrzeug- und Umgebungs-Simulation auf einer flexibel konfigurierbaren Hardware.

Custom User Interface in DYNA4
In DYNA4 können Sie die Benutzerführung für Ihre Simulationsaufgaben über HTML-Oberflächen vorgeben.
Analyse des Energie- und Wärmemanagements
Durch die Kopplung des virtuellen Gesamtfahrzeugs DYNA4 mit KULI können das Energie- und Wärmemanagement im Fahrzeug ganzheitlich analysiert werden.
Hochdynamische Regelung des Zylinderdruckverlaufs
Maximale Detailtiefe bei gleichzeitiger Echtzeitfähigkeit erfordert eine optimale Abstimmung von Modellkomplexität und vorhandener Rechenleistung.