
DYNA4 Simulationsframework für Teamwork und Nachvollziehbarkeit
DYNA4 ist eine modulare Simulationssoftware für effizientes Arbeiten mit Simulationsmodellen im Fahrzeug-Entwicklungsprozess, z. B. von Steuergeräten und Komponenten.
Offenes und flexibles Simulationsframework
- Nahtlose Integration Ihrer Simulationsmodelle in DYNA4 für ein durchgängiges Management von Modellen, Daten und Ergebnissen
- Die bewährte echtzeitfähige TESIS Modellbibliothek kann nach Ihren Wünschen zusammengestellt und angepasst werden (siehe DYNA4 Pakete)
- Anpassung an Ihre Arbeitsprozesse für eine effiziente Gesamtlösung entsprechend Ihren Bedürfnissen
- Schnittstellen zu Ihrer Infrastruktur, z. B. Testautomatisierung, MKS-Tools, Versionskontrolle
- Großer Einsatzbereich durch die offene Modellstruktur
- Kontinuierliche Wissensnutzung möglich - die Simulationssoftware läuft auf dem PC und auf allen gängigen HIL-Systemen
Teamwork-Funktionen für mehr Effizienz
- Arbeiten in Benutzergruppen: Experten erhalten viel Flexibilität, Simulationsanwender arbeiten mit vorkonfigurierten Einstellungen
- Globales Teamwork auf der Basis eines zentralen Model Repository mit Versionskontrolle
- Einfache Nachverfolgung von Modelländerungen durch Arbeitskollegen mit Hilfe von Vergleichsfunktionen
- Einfacher Austausch von Simulationsmodellen zwischen Abteilungen über das zentrale Model Repository
Anpassung und Engineering
- Anpassung von DYNA4 an Ihre Prozesse, z. B. spezielle GUIs, Ansichten und Reports
- Modellintegration, -anpassungen und Daten-Preprocessing
- Entwicklung von maßgeschneiderten Simulationsmodellen und -werkzeugen
- Anbindung von DYNA4 an Ihre Umgebung
- Modellparametrierung für unterschiedliche Fahrzeugregler
- Konfiguration und Inbetriebnahme von HiL-Systemen
Funktionsübersicht
| DYNA4 Pakete | |||||||
| Car Professional | Driver Assistance | Commercial Vehicles | Advanced Powertrain | Engine | Framework | ||
| Basis | |||||||
| Prozessunterstützung | |||||||
| Modell- und Datenverwaltung | |||||||
| Teamwork-Funktionalität | |||||||
| Variantenmanagement | |||||||
| Automatisierung | |||||||
| Integrierte Versionierung | |||||||
| Reportgenerierung und Plotting | |||||||
| Einfacher Wechsel zwischen MiL, SiL, HiL | |||||||
| Gleiche Signalverarbeitung in XiL-Stadien | |||||||
| Fahrzeug | |||||||
| Rollenprüfstandsmodell, 1D | |||||||
| Einfaches Zweispurmodell | |||||||
| Bremskraft Kennfelder | |||||||
| Reifenmodell mit Längs- und Querschlupf | |||||||
| Verbrennungsmotor Verbrauchskennfeld | |||||||
| Fahrer | |||||||
| Längsregler, Zyklusfahrer | |||||||
| Querregler | |||||||
| Reaktion auf Verkehrsteilnehmer | |||||||
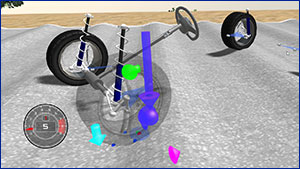
| 3D Visualisierung DYNAanimation | |||||||
| Fahrzeug und Fahrzeugverhalten | |||||||
| OpenDRIVE Straßennetz-Visualisierung | |||||||
| Generierung von Umwelt, Terrain, Wetter | |||||||
| Umfangreicher, erweiterbarer Objektkatalog | |||||||
| Verkehr und dynamische Objekte | |||||||
| Modulare Modellarchitektur1) | |||||||
| Flexible Simulink-Modellarchitektur | |||||||
| Kompilierung für PC-Anwendung | |||||||
| Integration und Schnittstellen1) | |||||||
| Integration von FMUs und S-Functions | |||||||
| Co-Simulation z.B. mit ROS und KULI | |||||||
| Schnittstelle zu Testautomatisierung und DoE Tools | |||||||
| Standalone Betrieb für HiL und SiL | |||||||
| Kompilieren für Echtzeitplattformen (HiL) | |||||||
| Run-Time-Projekte für CANoe und dSpace | |||||||
| Export als ADTF Filter oder CANoe-dll | |||||||
| Fahrdynamik | |||||||
| Hochaufgelöste Fahrdynamik | |||||||
| 3D Fahrdynamik, echtzeitfähig | |||||||
| Achskinematik über Tabellen und Compliance (KnC) | |||||||
| Mehrkörpermodelle für gängige Achstypen | |||||||
| Antriebstrang für gängige konventionelle Antriebe | |||||||
| Virtueller Achsprüfstand | |||||||
| Automatisierte Parametrierung aus Prüfstandsmessungen | |||||||
| Reifen | |||||||
| Reifenmodell TMeasy | |||||||
| Reifenmodell Pacejka | |||||||
| Schnittstelle zu MF Tyre 6.2 | |||||||
| Schnittstelle zu FTire | |||||||
| Virtueller Reifenprüfstand | |||||||
| Automatisierte Parametrierung aus Prüfstandsmessungen | |||||||
| Bremshydraulik | |||||||
| Hydraulikkomponenten | |||||||
| Beispiele für Zweikreisbremsanlagen | |||||||
| Anhänger | |||||||
| Bis zu zwei Anhänger | |||||||
| Auflieger, Deichsel und Drehschemel | |||||||
| Nutzfahrzeuge | |||||||
| Vier gelenkte und angetriebene Achsen | |||||||
| Torsionselastisches Chassis | |||||||
| Separat modelliertes Führerhaus | |||||||
| Motor und Antrieb | |||||||
| Modularer Antriebsstrang | |||||||
| Beliebige Antriebsarchitekturen (4x2, 8x8, HEV, EV etc.) | |||||||
| Mechanische Komponenten mit Wirkungsgrad | |||||||
| Fahrzyklen wie NEFZ, WLTP, FTP | |||||||
| Beispiele für gängige Architekturen | |||||||
| Bordnetz und Elektrik | |||||||
| Bordnetzarchitektur konfigurierbar | |||||||
| E-Motoren, Inverter und Batterie | |||||||
| Bordnetzte für 48V und Hochvolt, für HEV und EV | |||||||
| Motordynamik mittelwertbasiert | |||||||
| Zylindersektiv mit Momentenwelligkeit | |||||||
| Fremd- und Selbstzünder | |||||||
| Automatisierte Parametrierung aus Prüfstandsmessungen | |||||||
| Zusatzkomponenten Motor | |||||||
| Massenstrom und Energiefluss | |||||||
| Aufladung | |||||||
| Kraftstoffsystem | |||||||
| Abgasnachbehandlung | |||||||
| Zweikreis-Kühlsystem | |||||||
| Thermodynamisches Motormodell | |||||||
| Verbrennungsprozess mit Steuereingriff in Echtzeit | |||||||
| Druck und Temperatur im Zylinder | |||||||
| Ladungswechselrechnung | |||||||
| Zustandsberechnung im Abgasstrang | |||||||
| Umfeld | |||||||
| Fahrdynamikstrecke | |||||||
| 2D Prüfgelände | |||||||
| 3D Straße entlang S-Koordinate z.B. aus GPX-Daten | |||||||
| OpenDRIVE Straßennetz | |||||||
| 3D Verkehrsnetze (OpenDRIVE) | |||||||
| 3D Oberflächenmodelle (OpenCRG) | |||||||
| Verkehr | |||||||
| Fahrzeuge, Fußgänger, Zweiräder, Tiere | |||||||
| Deterministische Szenarien | |||||||
| Integration von stochastischer Verkehrssimulation | |||||||
| Umfeldsensoren | |||||||
| Idealisierte Objekterfassung | |||||||
| Kamera, GPU-basiert | |||||||
| Lidar, GPU-basiert | |||||||
| Radar, GPU-basiert | |||||||
| Ultraschall, GPU-basiert | |||||||
| Objektsegmentierung, GPU-basiert | |||||||
| Trajektorienplanung | |||||||
| Parametrierbare Ideallinie | |||||||
| Parametrierbare Geschwindigkeit | |||||||
Technologie
DYNA4 3.1
DYNA4 3.1 bietet echten Multi-Ego-Betrieb, 3D-Animation in 4K, ROS und SUMO Integration, NOx-Optimierung am HiL.

ADAS Entwicklung mit DYNA4 und ROS
Closed-Loop Fahrzeug-, Sensor und Umfeldsimulation für die ADAS & AD-Funktionsentwicklung in ROS.

SUMO-DYNA4-Integration
Integration von DYNA4 und SUMO Verkehrssimulation für virtuelle Fahrversuche in komplexem Umgebungsverkehr.

Sensorsimulation
Physikalische Modellierung von Ultraschall-, Lidar-, Kamera- und Radarsensoren in der DYNA4 Fahrzeug- und Umweltsimulation.

OpenDRIVE Straßen für virtuelle Testfahrten
Fahren auf OpenDRIVE Straßen ohne Konvertierung, für ADAS/AD-Entwicklung und Fahrdynamik-Tests.

3D-Welt für die simulations- basierte Funktionsentwicklung
Testen Sie Ihre ADAS/AD Funktionen nahtlos integriert in der DYNA4-Umgebung, verfügbar von MiL, SiL bis HiL
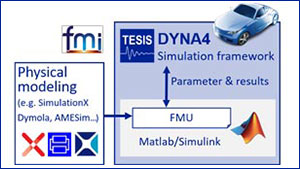
FMU Integration in DYNA4
FMUs werden nahtlos in DYNA4 integriert, wodurch Sie Parametrierung und Automatisierung im DYNA4-Framework nutzen können.

Virtueller Reifenprüfstand für die Fahrzeugsimulation
Mit dem virtuellen Reifenprüfstand generieren Sie automatisiert validierte Reifen für DYNA4 Fahrdynamik-Untersuchungen.

Suspension Toolbox für validierte Achsen
Automatisierte Achsgenerierung aus Daten von K&C Messungen oder MBS-Simulationen

FTire Reifenmodell in DYNA4
Das detaillierte FTire Reifenmodell kann vollintegriert in der DYNA4-Fahrzeug- Simulation incl. 3D-Animation genutzt werden.

HiL-System mit Vector CANoe
TESIS und Vector Informatik stellen ein smartes, skalierbares und effizient nutzbares Hardware-in-the-Loop-System vor.
TMeasy: Universelles Reifen- Modell für Fahrdynamik-Tests
TMeasy ist ein einfach nutzbares Reifenmodell für Handling-Untersuchungen mit realistischen Kräften auch bei niedrigen Geschwindigkeiten und im Stillstand.

Teamübergreifende Zusammenarbeit
Durch Versionierung mit Subversion wird rollen- und rechtebasierte Zusammenarbeit in der Simulation ermöglicht.

dSpace Scalexio HiL mit DYNA4
Für Steuergerätetests mit offener, modularer Fahrzeug- und Umgebungs-Simulation auf einer flexibel konfigurierbaren Hardware.

Custom User Interface in DYNA4
In DYNA4 können Sie die Benutzerführung für Ihre Simulationsaufgaben über HTML-Oberflächen vorgeben.
Analyse des Energie- und Wärmemanagements
Durch die Kopplung des virtuellen Gesamtfahrzeugs DYNA4 mit KULI können das Energie- und Wärmemanagement im Fahrzeug ganzheitlich analysiert werden.
Weitere Informationen und Kontakt
Weitere Informationen
- DYNA4 Fahrzeug- und Umfeldsimulation für virtuelle Testfahrten
- DYNA4 Funktionsübersicht
- Engineering-Services für den virtuellen Fahrversuch
- Schulungen für DYNA4
Testlizenz anfordern
Susanne Beckert
Telefon +49 89 74 73 77-20
Kontakt per E-Mail