
TESIS News
DYNA4 3.1
DYNA4 3.1 bietet echten Multi-Ego-Betrieb, 3D-Animation in 4K, ROS und SUMO Integration, NOx-Optimierung am HiL.

openMobility Working Group
TESIS - als Spezialist für virtuelle Testfahrten - ist Gründungsmitglied der openMobility Group der Eclipse Foundation.
DYNAware R3.5
DYNAware R3.5 mit veDYNA und enDYNA enthält Kompatibilitäts-Updates und neuen Funktionen zur Stickoxid-Berechnung.

Vector übernimmt TESIS
Vector Informatik, die Stuttgarter Spezialisten für das Entwickeln und Testen von Software und Fahrzeugelektronik, haben die TESIS zu 100 Prozent übernommen.

ASAM Standard OpenDRIVE in DYNA4
In DYNA4 ist der neue ASAM Standard OpenDRIVE nahtlos integriert, ebenso wie weitere Schnittstellen z.B. für XiL-Anwendungen.

DYNA4 3.0
DYNA4 3.0 bietet physikalisch basierte Sensor-Simulation, Euro NCAP Manöver sowie vielfältige neue Schnittstellen und Modellupdates.

Sensorsimulation
Physikalische Modellierung von Ultraschall-, Lidar-, Kamera- und Radarsensoren in der DYNA4 Fahrzeug- und Umweltsimulation.

Euro NCAP Tests 2018
Automatsierte virtuelle Fahrversuche nach Euro NCAP Testprotokoll 2018 inkl. Nacht und Radfahrer.
Vernetztes Fahren und C2X
Simulationsbasierte Entwicklung automatisierter und vernetzter Fahrzeuge sowie von C2X-Funktionen

OpenDRIVE Straßen für virtuelle Testfahrten
Fahren auf OpenDRIVE Straßen ohne Konvertierung, für ADAS/AD-Entwicklung und Fahrdynamik-Tests.

Valet Parking
Virtuelles Fahrzeug, Sensoren und Parkhäuser zur Entwicklung von automatisierten Parkfunktionen am PC oder HiL.
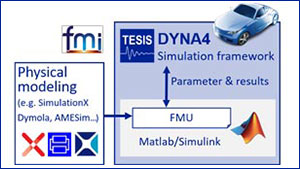
FMU Integration in DYNA4
FMUs werden nahtlos in DYNA4 integriert, wodurch Sie Parametrierung und Automatisierung im DYNA4-Framework nutzen können.

TESIS erhält Zertifizierung nach ISO 9001
Im Februar 2018 erhielt die TESIS nach der Auditierung durch den TÜV Süd die Zertifizierung nach ISO 9001.
Aus TESIS DYNAware wird TESIS
Nach der Neuorganisation der TESIS Firmengruppe übernehmen wir ab sofort den verkürzten Namen TESIS GmbH.
DYNA4 2.8
In DYNA4 2.8 wird das OpenDRIVE Standard-Straßenformat umfassend unterstützt. Fahrzeug-Achsen und Reifen lassen sich automatisiert generieren und validieren.
Neuronale Netze für semi-aktive Fahrwerksregelung
Simulationsbasierte Analyse des Reglerverhaltens einer semi-aktiven Fahrwerksregelung, die auf neuronalen Netzen beruht.
Release 3.4 für veDYNA und enDYNA
Das neue Release bietet z.B. Echtzeit- Simulation auf dSpace Scalexio und physikalische Motor- sowie Abgassimulation.
Systemsimulation für Hybridfahrzeuge
Systemsimulation des Gesamtfahrzeugs bietet Entscheidungsgrundlagen für die energetische Auslegung Ihres Hybrid- oder Elektrofahrzeugs.

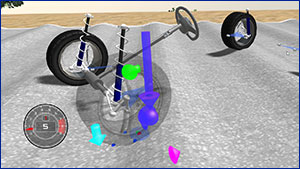
FTire Reifenmodell in DYNA4
Das detaillierte FTire Reifenmodell kann vollintegriert in der DYNA4-Fahrzeug- Simulation incl. 3D-Animation genutzt werden.

HiL-System mit Vector CANoe
TESIS und Vector Informatik stellen ein smartes, skalierbares und effizient nutzbares Hardware-in-the-Loop-System vor.
Plattform für interdisziplinäre Fahrzeugsimulation
TESIS startet gemeinsam mit der TU München das Projekt sim2gether für Lehrstuhl-übergreifende Modellnutzung.
TMeasy: Universelles Reifen- Modell für Fahrdynamik-Tests
TMeasy ist ein einfach nutzbares Reifenmodell für Handling-Untersuchungen mit realistischen Kräften auch bei niedrigen Geschwindigkeiten und im Stillstand.
Simulation von Teleskopladern und Staplern
Dynamische Simulation für spezielle Nutzfahrzeuge, Entwicklung und Test des Fahrzeugverhaltens, Energiemanagement, Motor-ECUs und Fahrerassistenzsysteme.
Kamera-Prüfstand
Absicherung von Kamera-basierten ADAS-Funktionen mit praxiserprobter Simulations-Software und Engineering für vielfältige HiL-Konfigurationen.

Teamübergreifende Zusammenarbeit
Durch Versionierung mit Subversion wird rollen- und rechtebasierte Zusammenarbeit in der Simulation ermöglicht.

dSpace Scalexio HiL mit DYNA4
Für Steuergerätetests mit offener, modularer Fahrzeug- und Umgebungs-Simulation auf einer flexibel konfigurierbaren Hardware.
Kooperation mit FEAAM für die Entwicklung von E-Antrieben
Durch die enge Verzahnung von virtuellen und realen Komponenten beider Partner entsteht ein durchgängiger Prozess für die Entwicklung von elektrischen Anrieben.

Custom User Interface in DYNA4
In DYNA4 können Sie die Benutzerführung für Ihre Simulationsaufgaben über HTML-Oberflächen vorgeben.