
Virtueller Fahrversuch für die Entwicklung von ADAS und AD
Mit DYNA4 Driver Assistance bieten wir Ihnen eine modulare, flexible Simulationsumgebung und das zugehörige Know-how für die Entwicklung von Fahrerassistenzsystemen und autonomen Fahrfunktionen. Damit können Sie virtuelle Fahrversuche auf dem OpenDRIVE Straßennetz, mit vielfältigen Verkehrsteilnehmern, Sensormodellen und 3D-Visualisierung durchführen.
Unsere Simulationslösungen unterstützen Sie dabei während des gesamten Entwicklungsprozesses: von der modellbasierten Reglerentwicklung über echtzeitfähige Simulationen mit Software-in-the-Loop (SiL) Systemen bis hin zum Hardware-in-the-Loop (HiL) Prüfstand.
Projektbeispiele und Einsatzspektrum
- Kamera-basierte Systeme, z. B. Spurerkennung, Verkehrszeichenerkennung.
Projektbeispiel Kamera-Prüfstand - Sensor-basierte Systeme, z. B. Abstandsregeltempomat, Stauassistent, Totwinkel-Überwachung, Spurwechselassistent oder Einparkunterstützung
Projektbeispiel Valet Parking - Systeme auf Basis externer Daten, z. B. Car2X Kommunikation, Navigationsdaten für elektronischen Horizont und vorausschauendes Energiemanagement
Projektbeispiel Car2x - Pre-Crash Systeme, z. B. Kollisionswarnung (FCW), Notbremsassistent (AEB),
Vorkonfigurierte Tests nach Euro NCAP
Vorteile durch virtuelle Fahrversuche
- Sicherheit gewinnen: Simulation kritischer Verkehrs- und Kollisionsszenarien
- Kosten sparen: Automatisiert vielfältige Testfälle simulieren
- Entwicklungszeit verkürzen: Variantenvergleich bereits in frühen Entwicklungsstadien
3D-Animation Ihrer virtuellen Fahrmanöver, Umgebung und Verkehrsteilnehmer
Kombination von Methoden, Tools und Engineering
Aus diesem Spektrum von Methoden, Tools und Engineering entsteht eine passgenaue Gesamtlösung nach Ihren Anforderungen:
- Das offene Simulationsframework DYNA4 Driver Assistance beinhaltet:
- Verkehrsumgebung mit bewegten und statischen Objekten
- 3D Straßenmodell mit Fahrspuren, Fahrbahnmarkierungen und Verkehrszeichen
- Fahrermodell mit Manöversteuerung
- Sensormodell
- 3D Echtzeitanimation, z.B. für den Einsatz in einem Kamera-HiL
- DYNA4 Anpassungen: Wir integrieren Ihre Modellkomponenten (z. B. Sensoren, Straßenmodelle, Fahrerassistenzsysteme, etc.) und Arbeitsabläufe in eine effiziente Gesamtlösung.
- Beratung und Engineering für den Aufbau und die Integration einer für Ihren Entwicklungsprozess geeigneten Simulationslandschaft.
- Datenintegration: Anbindung von externen Routeninformationen (z. B. aus Navigationssystemen oder
ADAS-RP). - Entwicklung maßgeschneiderter Modelle entsprechend Ihren Anforderungen, z. B. in Matlab/Simulink, Dymola, C oder C++.
Videos
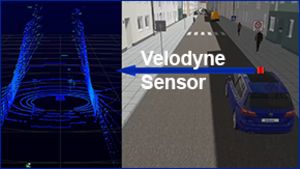
Virtuelles Fahrzeug, Verkehr und Lidar Sensor Simulation in DYNA4, für die Funktionsentwicklung von ADAS und AD.
Kundenreferenzen
Formula Student Driverless
Das erfolgreiche Driverless-Team von KA-RaceIng nutzt Simulation mit DYNA4 und ROS zur Validierung ihres autonomen Systems.

Valet Parking
Virtuelles Fahrzeug, Sensoren und Parkhäuser zur Entwicklung von automatisierten Parkfunktionen am PC oder HiL.
Ford: Modellbasiertes Testen des Fahrspur-Assistenten
Mit modellbasierter Entwicklung schließt Ford Fehlerquellen frühzeitig aus und reduziert teure Tests mit Prototypen.