
Virtual Test Driving for the Development of ADAS and AD
With DYNA4 Driver Assistance you get a modular, flexible simulation environment and the necessary expertise for simulation-based development of driver assistance systems and autonomous driving. Virtual test driving on the OpenDRIVE road network, with versatile traffic participants, sensor models and 3D visualization.
TESIS simulation solutions will support you throughout the entire development process: from model-based controller development and real-time-capable simulations with software-in-the-loop (SiL) systems right through to hardware-in-the-loop (HiL) test stands.
Project examples and applications
- Camera-based systems, e.g. lane detection, traffic sign recognition
Project example camera HiL - Sensor-based systems, e.g. adaptive cruise control, traffic jam assistant, blind spot monitoring, lane change assistant or parking assistant
Project example valet parking - Systems based on external data, e.g. Car2X communication, navigation data for electronic horizon, predictive energy management
Project example Car2X - Pre-crash systems, e.g. collision warning (FCW), emergency braking assistant (AEB)
Pre-configured virtual tests according to Euro NCAP
Advantages of virtual test driving
- Improve safety: simulation of critical traffic and collision scenarios
- Cut costs: automatic simulation of a wide variety of test cases
- Reduce development time: variant comparison even at early stages of development
3D-animation of your virtual test maneuvers, including environment and traffic participants
Combination of methods, tools and engineering
Our wide range of methods, tools and engineering ensures that we can provide the optimum solution for your requirements:
- The open simulation framework DYNA4 Driver Assistance includes:
- Traffic environment with moving and stationary objects
- 3D road model with lanes, road markings and traffic signs
- Driver model with maneuver control
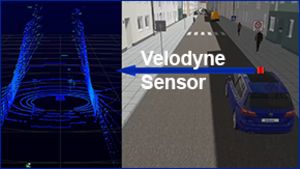
- Sensor model
- 3D real-time animation, e.g. for camera HILs - DYNA4 adaptations: we integrate your model components (e.g. sensors, road models, driver assistance systems, etc.) and working processes into an efficient overall solution.
- Consulting and engineering for the design and integration of a simulation landscape suitable for your development process
- Data integration: integration of external route information (e.g. from navigation systems or ADAS-RP).
- Development of tailor-made models according to your requirements, e.g. in Matlab/Simulink, Dymola, C or C++.
Videos
Customer References

Formula Student Driverless
KA-RaceIng's sucessful Driverless team uses simulation with DYNA4 and ROS for validation of their autonomous system.

Valet Parking
Virtual vehicle, sensors and parking garages for development of automated parking functions on the PC or HiL system.
Ford: Model-based testing of the lane keeping system
Ford uses model-based development to exclude error sources in an early development stage and reduces expensive prototype testing.