
DYNA4 Vehicle and Environment for Virtual Test Driving
Open Simulation Environment for Virtual Test Driving of Cars and Commercial Vehicles
DYNA4 vehicle and environment simulation runs many times faster than real-time on the PC or can be run on Hardware-in-the-Loop systems (HiL). The simulation models for vehicle dynamics, powertrain, combustion engines and traffic are used for function development and ECU tests in virtual driving tests.
DYNA4 is driven by industry standards and connects to your tool chain via flexible interfaces. The Simulink-based modeling with DYNA4 guarantees the re-use of your components or Funcitonal Mockup Units (FMUs) and thus allows efficient Rapid Prototyping. The 3D animated world with road infrastructure and traffic provides a realistic environment for virtual testing of your ADAS sensors, as cameras, lidar, radar and ultrasonic.
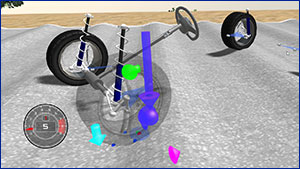
Screenshots simulation in DYNA4
Function overview
Legend: Included Optional Annotation: 1) full functionality only with add-on Developer
| DYNA4 Packages | |||||||
| Car Professional | Driver Assistance | Commercial Vehicles | Advanced Powertrain | Engine | Framework | ||
| Basis | |||||||
| Process support | |||||||
| Model and data management | |||||||
| Teamwork functionality | |||||||
| Variant management | |||||||
| Automation | |||||||
| Integrated versioning | |||||||
| Plotting and reporting | |||||||
| Simple switching between MiL, SiL, HiL | |||||||
| Continuous signal tracing for all XiL-levels | |||||||
| Vehicle | |||||||
| Roller dynamometer model, 1D | |||||||
| Simplified two-track model | |||||||
| Brake force map | |||||||
| Tire model with lateral and longitudinal slip | |||||||
| Combustion engine consumption map | |||||||
| Driver | |||||||
| Longitudinal control, cycle driver | |||||||
| Lateral control | |||||||
| Response to road users | |||||||
| 3D Visualization DYNAanimation | |||||||
| Vehicle and vehicle behavior | |||||||
| OpenDRIVE road networks | |||||||
| Generation of environment, terrain, weather | |||||||
| Extensive, extendable object catalog | |||||||
| Traffic and dynamic objects | |||||||
| Modular model architecture1) | |||||||
| Flexible Simulink model architecture | |||||||
| Code generation for PC application | |||||||
| Integration and interfaces1) | |||||||
| Integration of FMUs and S-Functions | |||||||
| Co-simulation interfaces e.g. for KULI and ROS | |||||||
| Interface to tools for test automation and DoE | |||||||
| Stand-alone operation for HiL and SiL | |||||||
| Code generation for real-time targets (HiL) | |||||||
| Run-time projects for CANoe and dSpace | |||||||
| Export as ADTF Filter or CANoe-dll | |||||||
| Vehicle dynamics | |||||||
| High-fidelity vehicle dynamics | |||||||
| 3D vehicle dynamics | |||||||
| Axle kinematics via tables and compliance (KnC) | |||||||
| Multi-body models for typical axles | |||||||
| Powertrain for typical conventional propulsion | |||||||
| Virtual suspension test rig | |||||||
| Automated parametrization from test rigs | |||||||
| Tire | |||||||
| Tire model TMeasy | |||||||
| Tire model Pacejka | |||||||
| Interface to MF Tyre 6.2 | |||||||
| Interface to FTire | |||||||
| Virtual tire test rig | |||||||
Automated parametrization from test rigs | |||||||
| Brake hydraulics | |||||||
| Hydraulic components | |||||||
| Examples for dual circuit brake systems | |||||||
| Trailer | |||||||
| Up to two trailers with four axles each | |||||||
| Semitrailer, drawbar and turntable | |||||||
| Commercial vehicles | |||||||
| Four steered and driven axles | |||||||
| Torsionally elastic chassis | |||||||
| Separately modelled cabin | |||||||
| Engine and powertrain | |||||||
| Modular powertrain | |||||||
| Any topology (4x2, 8x8, HEV, EV etc.) | |||||||
| Mechanical components with losses | |||||||
| Driving cycles like NEDC, WLTP, FTP | |||||||
| Examples for typical topologies | |||||||
| Electrical system | |||||||
| Configurable electrical system | |||||||
| E-engines, inverter and battery | |||||||
| Electrical systems for 48V and high voltage, for HEV and EV | |||||||
| Engine dynamics based on mean-value | |||||||
| Cylinder specific with torque ripple | |||||||
| External and self-ignition | |||||||
| Automated parametrization from test rigs | |||||||
| Additional components engine | |||||||
| Mass and energy flow | |||||||
| Turbo charging | |||||||
| Fuel system | |||||||
| Exhaust aftertreatment | |||||||
| Dual-circuit cooling system | |||||||
| Thermodynamic engine model | |||||||
| Combustion process with control in real-time | |||||||
| In-cylinder pressure and temperature | |||||||
| Charge exchange calculation | |||||||
| State calculation in exhaust gas system | |||||||
| Environment | |||||||
| Driving dynamics tracks | |||||||
| 2D proving ground | |||||||
| 3D road along S-coordinate e.g. from GPX data | |||||||
| OpenDRIVE road network | |||||||
| 3D road networks (OpenDRIVE) | |||||||
| 3D surface profiles (OpenCRG) | |||||||
| Traffic | |||||||
| Vehicles, pedestrians, bikes, animals | |||||||
| Deterministic scenarios | |||||||
| Integration of stochastic traffic simulation | |||||||
| Environment sensors | |||||||
| Idealized object detection | |||||||
| Camera, GPU-based | |||||||
| Lidar, GPU-based | |||||||
| Radar, GPU-based | |||||||
| Ultrasonic, GPU-based | |||||||
| Object segmentation, GPU-basiert | |||||||
| Trajectory calculation | |||||||
| Configurable racing line | |||||||
| Configurable speed | |||||||
DYNA4 Applications
Automotive simulation with DYNA4 comprises a wide range of applications, depending on the integrated models. Typical examples are:
Applications throughout the development process
- Model-based design, function development
- Testing and pre-calibration in SIL and HIL environments
- Fail-safe and functional tests, including evaluation of vehicle response and drivability
- Components-in-the-loop in physical or virtual component test rigs, e.g. for engines, suspension, steering, tires and dampers
- Fast parameter studies and optimization of vehicle components, e.g. drive train concepts, steering system and axle suspension
- Fundamental analyses and variant studies of single or interconnected vehicle controllers or components
✔ Covered by every DYNA4 simulation solution
Vehicle dynamics and drive train development
- Standard test maneuvers using a virtual prototype
- Optimization of vehicle dynamics performance
- Active safety systems such as global chassis control, ESP/ESC or trailer stabilization
- Steering systems: design and testing of electric power steering and active steering systems
- Ride comfort: air suspension, active damper control
- Drive systems such as active stability control, modern 4WD configurations or active torque differentials
- Roll over protection, roll control, sky hook control, load leveling
- Driving simulators
✔ Suitable simulation package: DYNA4 Car Professional
Driver assistance systems
- Radar, ultrasonic and camera-based systems
- Integrated safety systems, e.g. adaptive cruise control, lane change assistant and collision warning
- Testing of camera systems in the lab using 3D graphics and virtual environment, e.g. lane departure warning and traffic sign recognition
- Testing of other assistance systems, such as blind spot detection, pedestrian protection, parking assistant, adaptive headlights, bend lighting
✔ Suitable simulation package: DYNA4 Driver Assistance
Advanced powertrain development and energy management
- Fuel efficiency simulation for hybrid (HEV), electric (EV) or traditional vehicles
- Analysis and optimization of operation strategies for fuel efficiency and driving performance
- Function development, e.g. for hybrid drive torque coordination, engine start/stop or regenerative braking
- Navigation data-based, predictive functions, e.g. for battery SOC management
- Energy and thermal management, e.g. for electric system voltage stability, battery or inverter temperature control
✔ Suitable simulation package: DYNA4 Advanced Powertrain
Engine design and control
- Evaluation of conceptual design for gasoline, diesel and alternative fuels
- Function development and calibration of controllers, e.g. for supercharging, variable valve actuation, EGR or HCCI
- HIL tests, e.g. for engine controllers with cylinder pressure sensing or controllers for exhaust gas aftertreatment
- Car engines, high rev motorsport, heavy-duty or marine engines
✔ Suitable simulation package: DYNA4 Engine
Commercial Vehicles
- Stability investigations in critical driving situations, e.g. roll-over protection, skidding prevention
- Safety analyses of commercial vehicles subject to road disturbances, e.g. lane grooves and patches of different road surfaces
- Pre-calibration of control devices on the hardware-in-the-loop simulator
- Development and hardware-in-the-loop testing of vehicle dynamics controllers for truck and trailer stabilization
- Integration tests in laboratory vehicles
- Homologation of ECUs for commercial vehicles
✔ Suitable simulation package: DYNA4 Commercial Vehicles
Advantages of DYNA4 Vehicle Simulation
- Frontloading: First tests of ECU functions Steuergerätefunktionen before real prototypes are available
- Safe tests with people, animals and vehicles during critical driving manoeuvres, e. g. emergency braking or evasive action
- Thousands of automated driving tests in the shortest possible time due to parameter variations
- Weather independence: Virtual tests in rain, snow, fog, wind etc.
- Direkt comparsion of different configurations, design variants etc.
- Optimization of complex systems, e.g. for operation strategies
- Traceability of all tests through systematic administration and versioning models, data and results
DYNA4 Concept
The DYNA4 modular simulation environment consists of two main parts: an open demand-oriented Model Repository and a flexible, process-oriented tool environment (DYNA4 Framework).
DYNA4 Model Repository
The DYNA4 Model Repository provides a clearly laid out user environment to administer and parameterize your own simulation models as well as the TESIS model library included
- Assemble your virtual vehicles for test drives on the PC or HIL
- Integrate your own simulation models seamlessly into DYNA4 and take advantage of all framework functions
- The Model Repository is furnished with a base model library
- You can easily add advanced DYNA4 simulation models (more information on DYNA4 Packages)
DYNA4 Framework
- Clear management of models, data, simulation scenarios and results
- Transparency, traceability and reproducibility of simulation projects
- Open model structure in Matlab/Simulink
- Seamless integration of your simulation models in the DYNA4 GUI
- Integrated test automation and parameter variation
- Adaptations to your workflows with configuration of views, Eclipse plugins, HTML user interfaces
- Rapid overview and automatic comparison of simulation results for different vehicle variants
- Standard interfaces e.g. for ROS, ASAM, ADTF etc.
- 3D Animation of your vehicle simulations with DYNAanimation
- Software runs platform independent on PCs and on all common real-time platforms
Customer references

Formula Student Driverless
KA-RaceIng's sucessful Driverless team uses simulation with DYNA4 and ROS for validation of their autonomous system.
AL-KO: Automated testing of trailer stabilization
Far-reaching improvements to AL-KO trailer stabilization with simulation-based investigations of trailer variants.
TU Munich: System Simulation in DYNA4 based on ADAMS Data
Simulation based development of the Visio.M battery electric vehicle with automated usage of Adams axle data.
Technology
DYNA4 3.1
DYNA4 3.1 offers full multi-ego vehicle simulation, 3D animation in 4K, ROS and SUMO integration, NOx optimization on HiL systems.

ADAS Development with DYNA4 and ROS
Closed-loop vehicle, sensor and environment simulation for ADAS & AD function development in ROS.

SUMO-DYNA4-Integration
Integration of DYNA4 with SUMO traffic simulation to perform vehicle testing in complex surrounding traffic.

Sensor simulation
Physical modeling of ultrasonic, lidar, camera and radar sensors in the the DYNA4 vehicle and environment simulation.

OpenDRIVE road network
Driving on OpenDRIVE roads without conversion. Development of ADAS & AD functions and test of vehicle dynamics.

3D world for simulation based function development
Test your ADAS and AD functions integrated seamlessly in the DYNA4 environment for virtual test driving. From MiL, SiL up to HiL systems.
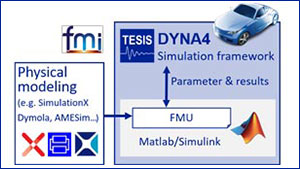
FMU Import: Use of Modelica-based models in DYNA4
FMUs are seamlessly integrated into DYNA4. Thus you can use parameterization and automation functionality of the DYNA4 framework.

Virtual Tire Test Rig for vehicle simulation
Using the virtual Tire Test Rig you automate your tire generation for vehicle dynamics and entire vehicle simulations in DYNA4.

Suspension Toolbox for validated axles
Automated suspension generation from K&C measurement data or MBS simulations.

FTire tire model in DYNA4
The detailed FTire model can be used fully integrated in the DYNA4 vehicle simulation environment including 3D animation.

Smart HiL-System with Vector CANoe
TESIS and Vector Informatik present a smart, scalable, and efficient Hardware-in-the-Loop test system.
Easy-to-use tire model for vehicle dynamics test drives
TMeasy is a very easy-to-use tire model for vehicle dynamics investigations, realistic parking torques and low speed behavior.

Collaborative engineering with DYNA4
Version control with Subversion enables role-based and rights-based collaboration in the simulation environment DYNA4.

dSpace Scalexio HiL system with DYNA4
ECU testing with open, modular vehicle and environment simulation software on a flexible configurable hardware.

Custom User Interface in DYNA4
You can guide the user via customized HTML interfaces for your simulation tasks in DYNA4.
Analysis of energy and thermal management in the vehicle
The coupling of the DYNA4 virtual complete vehicle with KULI will enable an integrated analysis of the energy and thermal management in the vehicle to be performed.
Videos
DYNA4 Animation Examples
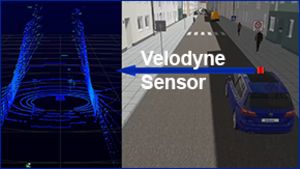
Virtual vehicle, city traffic and Velodyne Lidar sensor in DYNA4 for development of ADAS and AD functions.
Truck platooning with multi-ego vehicle simulation for development of cooperative driving functions.
DYNA4 and ROS in function development for autonomous driving. Example with lidar and camera signals in a parking garage.
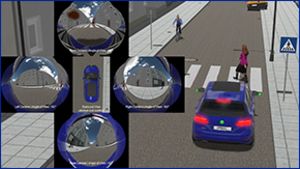
Image injection of ultra wide angle cameras for the development of surround view algorithms.

Unity's Windridge environment for virtual test drives with DYNA4 and stochastic SUMO traffic.
Virtual test driving on OpenDRIVE motorway with SUMO traffic at different light and weather conditions.
KA-RaceIng: Development of the driverless vehicle with the vehicle and environment simulation DYNA4 and ROS.

Virtual test drives by day and by night, driving into a tunnel with changing light conditions.

Physics based sensor simulation: Lidar, ultrasonic and camera sensors for the development of ADAS/AD functions
Test of AEB and FCW functions according to Euro NCAP 2018, incl. scenarios at night and with bicycles.

Development of car2x functions in a virtual environment, incl. vehicle, environment, sensors.
Development of automated parking functions in a virtual environment, incl. vehicle, parking garage, sensors.

Test your ADAS and AD functions in the virtual world, e.g. with city traffic and pedestrians.
Scene with child and ball for virtual test of AEB systems (autonomous emergency brake) with pre-defined maneuvers.

Virtual NCAP testing of the AEB system with pre-defined maneuvers. Moving, standing and braking vehicle.
Vehicle dynamics simulation for cars, trucks and race cars. Driving on banked corner with detailed vehicle dynamics.
Virtual test driving on a bumpy road with DYNA4 Car Professional vehicle simulation and the detailed tire model FTire.

Virtual test driving on the OpenDRIVE road network with integrated CRG profiles.
Use gpx or other measurement data for your virtual test drives in DYNA4. Automated visualization as 3D animation.
NCAP test of automated emergency brake (AEB) with pre-defined maeuvers, incl. pedestrians, children and adults.
DYNA4 3.1 hardware & software compatibility
| Operating Systems | Support | |
| Windows, 64 bit versions | ||
| Windows 10 | ||
| Windows 7 | ||
| Matlab / Simulink 1) | ||
| Matlab / Simulink, 64 bit versions | ||
| Matlab 9.6 (R2019a) | ||
| Matlab 9.5 (R2018b) | ||
| Matlab 9.4 (R2018a) | ||
| Matlab 9.3 (R2017b) | ||
| Matlab 9.2 (R2017a) | ||
| Matlab 9.1 (R2016b) | ||
| Real-time platforms | ||
| dSpace 2) DS1006 3), DS1007 3) and Scalexio | ||
| dSpace R2018-B | ||
| dSpace R2018-A | ||
| dSpace R2017-B | ||
| dSpace R2017-A | ||
| dSpace R2016-B | ||
| Vector Informatik | ||
| CANoe 12.0 4) | ||
| CANoe 11.0 5) | ||
| CANoe 10.0 6) | ||
| National Instruments 7) | ||
| NI VeriStand 2018 | ||
| ADTF | ||
| ADTF 2.x win64_vc100 7) | ||
| ADTF 2.x linux64 | ||
| ETAS | ||
| ETAS Labcar-Operator 5.4.4 | ||
| ETAS Labcar-Operator 5.4.3 | ||
| expleo (formerly Assystem) | ||
| Modular HiL / Messina | ||
| MicroNova | ||
| NovaCarts | ||
| MathWorks / Speedgoat | ||
| Simulink Real-Time | ||
| Opal-RT | ||
| Opal-RT RT-Lab | ||
| Concurrent | ||
| iHawk | ||
| iSyst | ||
| iSyTester | ||
Annotations
Expand the table with + for more details.
1) Accelerator, Rapid Accelerator mode and RSIM target build require a supported Microsoft Visual C/C++ Compiler (VS2010, Windows SDK v7.1, VS2015, VS2017) details in the Installation Guide
2) dSpace XiL API has to be installed
3) OpenDRIVE roads not supported on platform
4) Vector add-on Matlab Interface V6.1.2 required
5) Vector add-on Matlab Interface V5.0.7, V5.1.3 or V6.0.4 required
6) Vector add-on Matlab Interface V4.2.4 required
7) Only in combination with Microsoft Visual 2010 C/C++ Compiler (e.g. by installing the free Windows SDK v7.1, details in the Installation Guide)
Legend
| Supported off-the-shelf | |
| Supported on demand |
More information, contacts and support
Further information
- Engineering-Services for virtual test driving
- Training courses for DYNA4
Request evaluation license
Susanne Beckert
Phone +49 89 74 73 77-20
Send an email message
Support
Visit the support page
From 9:00am to 5:00pm CET
Send support request >>
Download link for updates >>