
Videos: Virtual Test Driving with TESIS Simulation Solutions
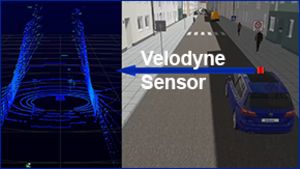
Virtual vehicle, city traffic and Velodyne Lidar sensor in DYNA4 for development of ADAS and AD functions.
Truck platooning with multi-ego vehicle simulation for development of cooperative driving functions.
DYNA4 and ROS in function development for autonomous driving. Example with lidar and camera signals in a parking garage.
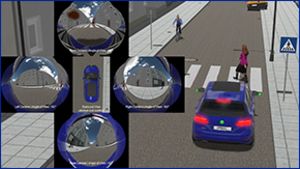
Image injection of ultra wide angle cameras for the development of surround view algorithms.

Unity's Windridge environment for virtual test drives with DYNA4 and stochastic SUMO traffic.
Virtual test driving on OpenDRIVE motorway with SUMO traffic at different light and weather conditions.
KA-RaceIng: Development of the driverless vehicle with the vehicle and environment simulation DYNA4 and ROS.

Virtual test drives by day and by night, driving into a tunnel with changing light conditions.
Test of AEB and FCW functions according to Euro NCAP 2018, incl. scenarios at night and with bicycles.

Physics based sensor simulation: Lidar, ultrasonic and camera sensors for the development of ADAS/AD functions

Development of car2x functions in a virtual environment, incl. vehicle, environment, sensors.
Development of automated parking functions in a virtual environment, incl. vehicle, parking garage, sensors.

Test your ADAS and AD functions in the virtual world, e.g. with city traffic and pedestrians.
Scene with child and ball for virtual test of AEB systems (autonomous emergency brake) with pre-defined maneuvers.

Virtual NCAP testing of the AEB system with pre-defined maneuvers. Moving, standing and braking vehicle.
Vehicle dynamics simulation for cars, trucks and race cars. Driving on banked corner with detailed vehicle dynamics.
Virtual test driving on a bumpy road with DYNA4 Car Professional vehicle simulation and the detailed tire model FTire.

Virtual test driving on the OpenDRIVE road network with integrated CRG profiles.
Use gpx or other measurement data for your virtual test drives in DYNA4. Automated visualization as 3D animation.
NCAP test of automated emergency brake (AEB) with pre-defined maeuvers, incl. pedestrians, children and adults.
3D animation of a virtual test rig for mild hybrid vehicles with 48 V components on WLTP, NEFZ or real driving cycles.
TMeasy is a very easy-to-use real-time and highly accurate tire model for vehicle dynamics investigations.
Dynamic Simulation for special purpose vehicles: Analysis and visualization of the vehicle behaviour, energy consumption or driver assistance systems.
Iveco: Simulation of multi-axle Trucks for automated ESP-Testing. HiL-Simulation with validated models for automated safety and vehicle dynamics tests.
ESP function tests on a HiL system: Overtaking maneuver at the dynamics driving limits on a wet road.
TESIS vehicle and environment simulation for function development. Including variant handling, traceability and reproducibility.