
DYNA4 Simulation Framework For Teamwork and Traceability
DYNA4 is a modular simulation software for efficient work with simulation models in the automotive development process, e. g. of electronic control units and components.
Open and flexible simulation framework
- Seamless integration of your simulation models into DYNA4 for clear management of models, data and results
- TESIS' proven real-time model library can be extended and adapted as required (see DYNA4 Packages)
- Adaptation to your work processes to obtain an efficient solution that is tailored to your requirements
- Interfaces to your infrastructure, e.g. test automation, MBS tools, version control systems
- Wide range of applications due to open model concept
- Runs on a PC and on all common real-time platforms, thus ensuring knowledge continuity
Teamwork functions for more efficiency
- Efficient project organization for reproducibility and traceability
- Versioned model management to track changes
- Automated simulations to compare numerous variations
- Automated report generation and interactive result visualization
- Illustrative 3D animations
Customization and engineering
- Adaptation of DYNA4 to your processes, e.g. with special GUIs, views and reports
- Simulation model support: model integration, adaptations, data preprocessing
- Development of customized simulation models and tools
- Connection of DYNA4 to your work environment
- Model parameterization for various vehicle controllers
- Configuration and commissioning of HIL systems
Function Overview
| DYNA4 Packages | |||||||
| Car Professional | Driver Assistance | Commercial Vehicles | Advanced Powertrain | Engine | Framework | ||
| Basis | |||||||
| Process support | |||||||
| Model and data management | |||||||
| Teamwork functionality | |||||||
| Variant management | |||||||
| Automation | |||||||
| Integrated versioning | |||||||
| Plotting and reporting | |||||||
| Simple switching between MiL, SiL, HiL | |||||||
| Continuous signal tracing for all XiL-levels | |||||||
| Vehicle | |||||||
| Roller dynamometer model, 1D | |||||||
| Simplified two-track model | |||||||
| Brake force map | |||||||
| Tire model with lateral and longitudinal slip | |||||||
| Combustion engine consumption map | |||||||
| Driver | |||||||
| Longitudinal control, cycle driver | |||||||
| Lateral control | |||||||
| Response to road users | |||||||
| 3D Visualization DYNAanimation | |||||||
| Vehicle and vehicle behavior | |||||||
| OpenDRIVE road networks | |||||||
| Generation of environment, terrain, weather | |||||||
| Extensive, extendable object catalog | |||||||
| Traffic and dynamic objects | |||||||
| Modular model architecture1) | |||||||
| Flexible Simulink model architecture | |||||||
| Code generation for PC application | |||||||
| Integration and interfaces1) | |||||||
| Integration of FMUs and S-Functions | |||||||
| Co-simulation interfaces e.g. for KULI and ROS | |||||||
| Interface to tools for test automation and DoE | |||||||
| Stand-alone operation for HiL and SiL | |||||||
| Code generation for real-time targets (HiL) | |||||||
| Run-time projects for CANoe and dSpace | |||||||
| Export as ADTF Filter or CANoe-dll | |||||||
| Vehicle dynamics | |||||||
| High-fidelity vehicle dynamics | |||||||
| 3D vehicle dynamics | |||||||
| Axle kinematics via tables and compliance (KnC) | |||||||
| Multi-body models for typical axles | |||||||
| Powertrain for typical conventional propulsion | |||||||
| Virtual suspension test rig | |||||||
| Automated parametrization from test rigs | |||||||
| Tire | |||||||
| Tire model TMeasy | |||||||
| Tire model Pacejka | |||||||
| Interface to MF Tyre 6.2 | |||||||
| Interface to FTire | |||||||
| Virtual tire test rig | |||||||
Automated parametrization from test rigs | |||||||
| Brake hydraulics | |||||||
| Hydraulic components | |||||||
| Examples for dual circuit brake systems | |||||||
| Trailer | |||||||
| Up to two trailers with four axles each | |||||||
| Semitrailer, drawbar and turntable | |||||||
| Commercial vehicles | |||||||
| Four steered and driven axles | |||||||
| Torsionally elastic chassis | |||||||
| Separately modelled cabin | |||||||
| Engine and powertrain | |||||||
| Modular powertrain | |||||||
| Any topology (4x2, 8x8, HEV, EV etc.) | |||||||
| Mechanical components with losses | |||||||
| Driving cycles like NEDC, WLTP, FTP | |||||||
| Examples for typical topologies | |||||||
| Electrical system | |||||||
| Configurable electrical system | |||||||
| E-engines, inverter and battery | |||||||
| Electrical systems for 48V and high voltage, for HEV and EV | |||||||
| Engine dynamics based on mean-value | |||||||
| Cylinder specific with torque ripple | |||||||
| External and self-ignition | |||||||
| Automated parametrization from test rigs | |||||||
| Additional components engine | |||||||
| Mass and energy flow | |||||||
| Turbo charging | |||||||
| Fuel system | |||||||
| Exhaust aftertreatment | |||||||
| Dual-circuit cooling system | |||||||
| Thermodynamic engine model | |||||||
| Combustion process with control in real-time | |||||||
| In-cylinder pressure and temperature | |||||||
| Charge exchange calculation | |||||||
| State calculation in exhaust gas system | |||||||
| Environment | |||||||
| Driving dynamics tracks | |||||||
| 2D proving ground | |||||||
| 3D road along S-coordinate e.g. from GPX data | |||||||
| OpenDRIVE road network | |||||||
| 3D road networks (OpenDRIVE) | |||||||
| 3D surface profiles (OpenCRG) | |||||||
| Traffic | |||||||
| Vehicles, pedestrians, bikes, animals | |||||||
| Deterministic scenarios | |||||||
| Integration of stochastic traffic simulation | |||||||
| Environment sensors | |||||||
| Idealized object detection | |||||||
| Camera, GPU-based | |||||||
| Lidar, GPU-based | |||||||
| Radar, GPU-based | |||||||
| Ultrasonic, GPU-based | |||||||
| Object segmentation, GPU-basiert | |||||||
| Trajectory calculation | |||||||
| Configurable racing line | |||||||
| Configurable speed | |||||||
Technology
DYNA4 3.1
DYNA4 3.1 offers full multi-ego vehicle simulation, 3D animation in 4K, ROS and SUMO integration, NOx optimization on HiL systems.

ADAS Development with DYNA4 and ROS
Closed-loop vehicle, sensor and environment simulation for ADAS & AD function development in ROS.

SUMO-DYNA4-Integration
Integration of DYNA4 with SUMO traffic simulation to perform vehicle testing in complex surrounding traffic.

Sensor simulation
Physical modeling of ultrasonic, lidar, camera and radar sensors in the the DYNA4 vehicle and environment simulation.

OpenDRIVE road network
Driving on OpenDRIVE roads without conversion. Development of ADAS & AD functions and test of vehicle dynamics.

3D world for simulation based function development
Test your ADAS and AD functions integrated seamlessly in the DYNA4 environment for virtual test driving. From MiL, SiL up to HiL systems.
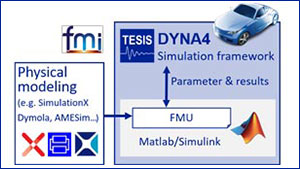
FMU Import: Use of Modelica-based models in DYNA4
FMUs are seamlessly integrated into DYNA4. Thus you can use parameterization and automation functionality of the DYNA4 framework.

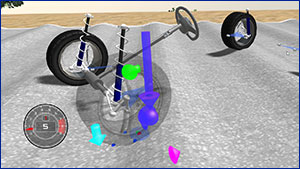
Virtual Tire Test Rig for vehicle simulation
Using the virtual Tire Test Rig you automate your tire generation for vehicle dynamics and entire vehicle simulations in DYNA4.

Suspension Toolbox for validated axles
Automated suspension generation from K&C measurement data or MBS simulations.

FTire tire model in DYNA4
The detailed FTire model can be used fully integrated in the DYNA4 vehicle simulation environment including 3D animation.

Smart HiL-System with Vector CANoe
TESIS and Vector Informatik present a smart, scalable, and efficient Hardware-in-the-Loop test system.
Easy-to-use tire model for vehicle dynamics test drives
TMeasy is a very easy-to-use tire model for vehicle dynamics investigations, realistic parking torques and low speed behavior.

Collaborative engineering with DYNA4
Version control with Subversion enables role-based and rights-based collaboration in the simulation environment DYNA4.

dSpace Scalexio HiL system with DYNA4
ECU testing with open, modular vehicle and environment simulation software on a flexible configurable hardware.

Custom User Interface in DYNA4
You can guide the user via customized HTML interfaces for your simulation tasks in DYNA4.
Analysis of energy and thermal management in the vehicle
The coupling of the DYNA4 virtual complete vehicle with KULI will enable an integrated analysis of the energy and thermal management in the vehicle to be performed.
More Information and Contact
Further information
- DYNA4 vehicle and environment simulation for virtual test drives
- DYNA4 function overview
- Engineering-Services for virtual test driving
- Training courses for DYNA4
Request evaluation license
Susanne Beckert
Phone +49 89 74 73 77-20
Send an email message