
DYNA4 Fahrzeug und Umgebung für den virtuellen Fahrversuch
Offene Simulationsumgebung für den virtuellen Fahrversuch von PKW und Nutzfahrzeugen.
Die DYNA4 Fahrzeugsimulation läuft in vielfacher Echtzeit auf dem PC oder im Hardware-in-the-Loop-Betrieb (HiL). Die Simulationsmodelle für Fahrdynamik, Antrieb, Verbrennungsmotor und Verkehrsumgebung werden zur Funktionsentwicklung und beim Test von Steuergeräten im virtuellen Fahrversuch eingesetzt.
DYNA4 setzt auf Industrie-Standards und verbindet sich über flexible Schnittstellen nahtlos mit Ihrer gewohnten Tool-Umgebung. Die Simulink-basierte Modellierung mit DYNA4 stellt die Wiederverwendung Ihrer Komponenten oder Functional Mockup Units (FMUs) sicher und ermöglicht somit effizientes Rapid-Prototyping. Die 3D-animierte Welt mit Straßeninfrastruktur und Verkehr versetzt Ihren virtuellen Fahrversuch in eine realitätsnahe Umgebung für ADAS-Sensoren wie Kameras, Lidar, Radar und Ultraschall.
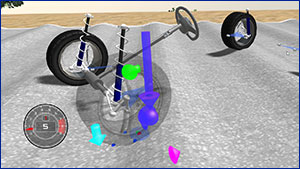
Screenshots Simulationen in DYNA4
Funktionsübersicht
Legende: Inbegriffen Optional Anmerkung: 1) Volle Funktionalität nur mit Add-On Developer
| DYNA4 Pakete | |||||||
| Car Professional | Driver Assistance | Commercial Vehicles | Advanced Powertrain | Engine | Framework | ||
| Basis | |||||||
| Prozessunterstützung | |||||||
| Modell- und Datenverwaltung | |||||||
| Teamwork-Funktionalität | |||||||
| Variantenmanagement | |||||||
| Automatisierung | |||||||
| Integrierte Versionierung | |||||||
| Reportgenerierung und Plotting | |||||||
| Einfacher Wechsel zwischen MiL, SiL, HiL | |||||||
| Gleiche Signalverarbeitung in XiL-Stadien | |||||||
| Fahrzeug | |||||||
| Rollenprüfstandsmodell, 1D | |||||||
| Einfaches Zweispurmodell | |||||||
| Bremskraft Kennfelder | |||||||
| Reifenmodell mit Längs- und Querschlupf | |||||||
| Verbrennungsmotor Verbrauchskennfeld | |||||||
| Fahrer | |||||||
| Längsregler, Zyklusfahrer | |||||||
| Querregler | |||||||
| Reaktion auf Verkehrsteilnehmer | |||||||
| 3D Visualisierung DYNAanimation | |||||||
| Fahrzeug und Fahrzeugverhalten | |||||||
| OpenDRIVE Straßennetz-Visualisierung | |||||||
| Generierung von Umwelt, Terrain, Wetter | |||||||
| Umfangreicher, erweiterbarer Objektkatalog | |||||||
| Verkehr und dynamische Objekte | |||||||
| Modulare Modellarchitektur1) | |||||||
| Flexible Simulink-Modellarchitektur | |||||||
| Kompilierung für PC-Anwendung | |||||||
| Integration und Schnittstellen1) | |||||||
| Integration von FMUs und S-Functions | |||||||
| Co-Simulation z.B. mit ROS und KULI | |||||||
| Schnittstelle zu Testautomatisierung und DoE Tools | |||||||
| Standalone Betrieb für HiL und SiL | |||||||
| Kompilieren für Echtzeitplattformen (HiL) | |||||||
| Run-Time-Projekte für CANoe und dSpace | |||||||
| Export als ADTF Filter oder CANoe-dll | |||||||
| Fahrdynamik | |||||||
| Hochaufgelöste Fahrdynamik | |||||||
| 3D Fahrdynamik, echtzeitfähig | |||||||
| Achskinematik über Tabellen und Compliance (KnC) | |||||||
| Mehrkörpermodelle für gängige Achstypen | |||||||
| Antriebstrang für gängige konventionelle Antriebe | |||||||
| Virtueller Achsprüfstand | |||||||
| Automatisierte Parametrierung aus Prüfstandsmessungen | |||||||
| Reifen | |||||||
| Reifenmodell TMeasy | |||||||
| Reifenmodell Pacejka | |||||||
| Schnittstelle zu MF Tyre 6.2 | |||||||
| Schnittstelle zu FTire | |||||||
| Virtueller Reifenprüfstand | |||||||
| Automatisierte Parametrierung aus Prüfstandsmessungen | |||||||
| Bremshydraulik | |||||||
| Hydraulikkomponenten | |||||||
| Beispiele für Zweikreisbremsanlagen | |||||||
| Anhänger | |||||||
| Bis zu zwei Anhänger | |||||||
| Auflieger, Deichsel und Drehschemel | |||||||
| Nutzfahrzeuge | |||||||
| Vier gelenkte und angetriebene Achsen | |||||||
| Torsionselastisches Chassis | |||||||
| Separat modelliertes Führerhaus | |||||||
| Motor und Antrieb | |||||||
| Modularer Antriebsstrang | |||||||
| Beliebige Antriebsarchitekturen (4x2, 8x8, HEV, EV etc.) | |||||||
| Mechanische Komponenten mit Wirkungsgrad | |||||||
| Fahrzyklen wie NEFZ, WLTP, FTP | |||||||
| Beispiele für gängige Architekturen | |||||||
| Bordnetz und Elektrik | |||||||
| Bordnetzarchitektur konfigurierbar | |||||||
| E-Motoren, Inverter und Batterie | |||||||
| Bordnetzte für 48V und Hochvolt, für HEV und EV | |||||||
| Motordynamik mittelwertbasiert | |||||||
| Zylindersektiv mit Momentenwelligkeit | |||||||
| Fremd- und Selbstzünder | |||||||
| Automatisierte Parametrierung aus Prüfstandsmessungen | |||||||
| Zusatzkomponenten Motor | |||||||
| Massenstrom und Energiefluss | |||||||
| Aufladung | |||||||
| Kraftstoffsystem | |||||||
| Abgasnachbehandlung | |||||||
| Zweikreis-Kühlsystem | |||||||
| Thermodynamisches Motormodell | |||||||
| Verbrennungsprozess mit Steuereingriff in Echtzeit | |||||||
| Druck und Temperatur im Zylinder | |||||||
| Ladungswechselrechnung | |||||||
| Zustandsberechnung im Abgasstrang | |||||||
| Umfeld | |||||||
| Fahrdynamikstrecke | |||||||
| 2D Prüfgelände | |||||||
| 3D Straße entlang S-Koordinate z.B. aus GPX-Daten | |||||||
| OpenDRIVE Straßennetz | |||||||
| 3D Verkehrsnetze (OpenDRIVE) | |||||||
| 3D Oberflächenmodelle (OpenCRG) | |||||||
| Verkehr | |||||||
| Fahrzeuge, Fußgänger, Zweiräder, Tiere | |||||||
| Deterministische Szenarien | |||||||
| Integration von stochastischer Verkehrssimulation | |||||||
| Umfeldsensoren | |||||||
| Idealisierte Objekterfassung | |||||||
| Kamera, GPU-basiert | |||||||
| Lidar, GPU-basiert | |||||||
| Radar, GPU-basiert | |||||||
| Ultraschall, GPU-basiert | |||||||
| Objektsegmentierung, GPU-basiert | |||||||
| Trajektorienplanung | |||||||
| Parametrierbare Ideallinie | |||||||
| Parametrierbare Geschwindigkeit | |||||||
DYNA4 Anwendungsbereiche
DYNA4 deckt – entsprechend den verwendeten Modellen im Model Repository – ein breites Anwendungsspektrum ab. Typische Beispiele sind:
Anwendungen während des Entwicklungsprozesses
- Modell-basierte Entwicklung, Funktionsentwicklung
- Testen und Vorkalibrieren in SiL- und HiL-Umgebungen
- Ausfallsicherheits- und Funktionstests, einschließlich Bewertung des Ansprechverhaltens des Fahrzeugs und des Fahrverhaltens
- Components-in-the-Loop-Tests von Bauteilen in physischen oder virtuellen Bauteilprüfständen, z.B. für Motoren, Radaufhängungen, Lenkungen, Reifen und Dämpfer
- Schnelle Parameterstudien und Optimierung von Fahrzeugteilen, z.B. Antriebsstrangkonzepte, Lenksystem und Radaufhängungen
- Grundsatzanalysen und Variantenstudien einzelner oder verbundener Fahrzeugsteuerungen oder -teile
→ Wird durch jedes DYNA4 Paket abgedeckt
Fahrdynamik und Antriebsstrangentwicklung
- Standard-Testmanöver mit virtuellen Prototypen
- Optimierung der Fahrdynamik
- Aktive Sicherheitssysteme wie ESP/ESC, globale Fahrwerksregelung oder Stabilitätssysteme für Anhänger
- Lenksysteme: Design und Tests von elektrisch angetriebenen Servolenkungen und aktiven Lenksystemen
- Fahrkomfort: Luftfederungen, aktive Dämpferregelung
- Fahrsysteme wie aktive Stabilitätskontrolle, moderne Allradsysteme oder das Differential mit aktiver Drehmomentenverteilung
- Überrollschutz, Wanksteuerung, Sky-Hook-Steuerung, Niveauregulierung
- Fahrsimulatoren
✔ Geeignetes Simulationspaket: DYNA4 Car Professional
Fahrerassistenzsysteme
- Radar-, ultraschall- und kamerabasierte Systeme
- Integrierte Sicherheitssysteme, z.B. adaptiver Tempo- und Abstandsregelautomat (ACC), Spurhalteassistent (LDW) und Kollisionswarnsystem
- Testen von Kamerasystemen im Labor mithilfe von 3D-Grafik und virtueller Umgebung, z.B. Spurhalteassistenzsysteme und Verkehrsschilderkennung
- Testen anderer Assistenzsysteme wie z.B. Blind Spot Detection, Fußgängerschutz, Parkassistent, adaptives Licht (AFL), Kurvenlichtsysteme
✔ Geeignetes Simulationspaket: DYNA4 Driver Assistance
Neue Antriebsstrangkonzepte und Energiemanagement
- Simulation der Kraftstoffeinsparung für Hybrid- (HEV), Elektrofahrzeuge (EV) oder konventionelle Antriebe
- Analyse und Optimierung von Betriebsstrategien zur Kraftstoffeinsparung und Fahrleistung
- Funktionsentwicklung, z.B. Drehmomentkoordinierung beim Hybridantrieb, Start/Stop-Funktion des Motors oder regeneratives Bremsen
- Datenbasierte Navigation, vorausschauende Funktionen, z.B. zum Batterieladestandsmanagement
- Energie- und Wärmemanagement, z.B. für Bordnetz-Spannungsstabilität, Batterie- oder Umrichter-Temperaturregelung
✔ Geeignetes Simulationspaket: DYNA4 Advanced Powertrain
Motorentwicklung und -steuerung
- Auswertung von Designkonzepten für Benzin, Diesel und alternative Kraftstoffe
- Funktionsentwicklung und Kalibrierung von Steuerungen, z.B. für Aufladesysteme, variable Ventilsteuerung, AGR oder HCCI
- HiL-Tests, z.B. für Motorsteuerungen mit Zylinderdrucksensoren oder Steuerungen zur Abgasnachbehandlung
- PKW-Motoren, hochtourige Rennmotoren, Schwerlast- oder Schiffsmotoren
✔ Geeignetes Simulationspaket: DYNA4 Engine
Nutzfahrzeuge
- Stabilitätsuntersuchungen für sicherheitskritische Fahrsituationen
- Sicherheitstests von Nutzfahrzeugen bei Straßenschäden wie z. B. Unebenheiten oder Spurrillen
- Vorkalibrierung von Regelsystemen im Hardware-in-the-Loop Simulator
- Entwicklung und Hardware-in-the-Loop-Tests von Regelsystemen zur Anhängerstabilisierung
- Integrationstests in Laborfahrzeugen
- Homologation von Steuergeräten für Nutzfahrzeuge
✔ Geeignetes Simulationspaket: DYNA4 Commercial Vehicles
Vorteile der Fahrzeugsimulation mit DYNA4
- Frontloading: Erste Tests von Steuergerätefunktionen, noch bevor reale Prototypen vorhanden sind
- Gefahrlose Tests mit Menschen, Tieren und Fahrzeugen bei kritischen Fahrmanövern, z. B. Notbremsungen oder Ausweichen
- Tausende automatisierte Fahrversuche in kürzester Zeit durch Parametervariationen
- Wetterunabhängigkeit: Virtuelle Tests bei Regen, Schnee, Nebel, Wind etc.
- Direkter Vergleich unterschiedlicher Konfigurationen, Auslegungs-Varianten etc.
- Optimierung von komplexen Systemen, z.B. für Betriebsstrategien
- Nachvollziehbarkeit sämtlicher Tests durch systematische Administration und Versionierung von Modellen, Daten und Ergebnissen
DYNA4 Konzept
Das modulare Simulationsumgebung DYNA4 beinhaltet zwei Grundkomponenten: Eine bedarfsorientierte und offene Modellbibliothek (Model Repository) sowie eine flexible, prozessorientierte Toolumgebung (DYNA4 Framework).
DYNA4 Model Repository
Im DYNA4 Model Repository können Sie Ihre eigenen Simulationsmodelle gemeinsam mit TESIS Modellen in einer übersichtlichen Benutzeroberfläche verwalten und parametrieren.
- Stellen Sie Ihr virtuelles Fahrzeug für Testfahrten auf dem PC oder HiL zusammen
- Sie integrieren Ihre eigenen Modelle nahtlos in DYNA4 und nutzen damit alle Framework-Funktionen
- Das Model Repository enthält hierfür eine Basis-Modellbibliothek
- Sie können einfach detailliertere TESIS Modelle hinzufügen
DYNA4 Framework
Das DYNA4 Framework bietet durch transparente Modell- und Datenverwaltung, Dokumentation, Automation, Reporting und Visualisierung effiziente Unterstützung für Ihre Simulations- und Testaufgaben.
- Übersichtliches Management von Modellen, Daten, Simulationsszenarien und Ergebnissen
- Transparenz, Nachvollziehbarkeit und Reproduzierbarkeit Ihrer virtuellen Testfahrten
- Offene Modellstruktur in Matlab/Simulink
- Nahtlose Integration Ihrer eigenen Modelle in die DYNA4 Benutzeroberfläche
- Integrierte Testautomatisierung und Parametervariation
- Anpassungen an Ihre Workflows durch Konfiguration von Views, Eclipse-Plugins, HTML-Oberflächen
- Industrie-Standard-Schnittstellen, z. B. zu ROS, ASAM, ADTF uvm.
- 3D-Visualisierung Ihrer Fahrzeugsimulationen mit DYNAanimation
- DYNA4 läuft plattformunabhängig sowohl auf dem PC als auch auf allen gängigen Echtzeit-Hardwareplattformen
Kundenreferenzen
Technologie
DYNA4 3.1
DYNA4 3.1 bietet echten Multi-Ego-Betrieb, 3D-Animation in 4K, ROS und SUMO Integration, NOx-Optimierung am HiL.

ADAS Entwicklung mit DYNA4 und ROS
Closed-Loop Fahrzeug-, Sensor und Umfeldsimulation für die ADAS & AD-Funktionsentwicklung in ROS.

SUMO-DYNA4-Integration
Integration von DYNA4 und SUMO Verkehrssimulation für virtuelle Fahrversuche in komplexem Umgebungsverkehr.

Sensorsimulation
Physikalische Modellierung von Ultraschall-, Lidar-, Kamera- und Radarsensoren in der DYNA4 Fahrzeug- und Umweltsimulation.

OpenDRIVE Straßen für virtuelle Testfahrten
Fahren auf OpenDRIVE Straßen ohne Konvertierung, für ADAS/AD-Entwicklung und Fahrdynamik-Tests.

3D-Welt für die simulations- basierte Funktionsentwicklung
Testen Sie Ihre ADAS/AD Funktionen nahtlos integriert in der DYNA4-Umgebung, verfügbar von MiL, SiL bis HiL
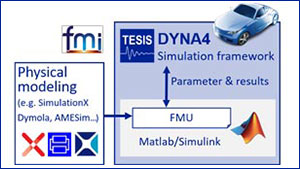
FMU Integration in DYNA4
FMUs werden nahtlos in DYNA4 integriert, wodurch Sie Parametrierung und Automatisierung im DYNA4-Framework nutzen können.

Virtueller Reifenprüfstand für die Fahrzeugsimulation
Mit dem virtuellen Reifenprüfstand generieren Sie automatisiert validierte Reifen für DYNA4 Fahrdynamik-Untersuchungen.

Suspension Toolbox für validierte Achsen
Automatisierte Achsgenerierung aus Daten von K&C Messungen oder MBS-Simulationen

FTire Reifenmodell in DYNA4
Das detaillierte FTire Reifenmodell kann vollintegriert in der DYNA4-Fahrzeug- Simulation incl. 3D-Animation genutzt werden.

HiL-System mit Vector CANoe
TESIS und Vector Informatik stellen ein smartes, skalierbares und effizient nutzbares Hardware-in-the-Loop-System vor.
TMeasy: Universelles Reifen- Modell für Fahrdynamik-Tests
TMeasy ist ein einfach nutzbares Reifenmodell für Handling-Untersuchungen mit realistischen Kräften auch bei niedrigen Geschwindigkeiten und im Stillstand.

Teamübergreifende Zusammenarbeit
Durch Versionierung mit Subversion wird rollen- und rechtebasierte Zusammenarbeit in der Simulation ermöglicht.

dSpace Scalexio HiL mit DYNA4
Für Steuergerätetests mit offener, modularer Fahrzeug- und Umgebungs-Simulation auf einer flexibel konfigurierbaren Hardware.

Custom User Interface in DYNA4
In DYNA4 können Sie die Benutzerführung für Ihre Simulationsaufgaben über HTML-Oberflächen vorgeben.
Analyse des Energie- und Wärmemanagements
Durch die Kopplung des virtuellen Gesamtfahrzeugs DYNA4 mit KULI können das Energie- und Wärmemanagement im Fahrzeug ganzheitlich analysiert werden.
Videos
DYNA4 Animationsbeispiele
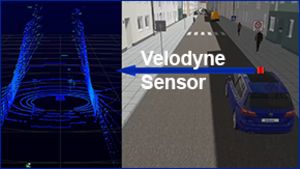
Virtuelles Fahrzeug, Verkehr und Lidar Sensor Simulation in DYNA4, für die Funktionsentwicklung von ADAS und AD.
DYNA4 3.1 hardware & software compatibility
| Operating Systems | Support | |
| Windows, 64 bit versions | ||
| Windows 10 | ||
| Windows 7 | ||
| Matlab / Simulink 1) | ||
| Matlab / Simulink, 64 bit versions | ||
| Matlab 9.6 (R2019a) | ||
| Matlab 9.5 (R2018b) | ||
| Matlab 9.4 (R2018a) | ||
| Matlab 9.3 (R2017b) | ||
| Matlab 9.2 (R2017a) | ||
| Matlab 9.1 (R2016b) | ||
| Real-time platforms | ||
| dSpace 2) DS1006 3), DS1007 3) and Scalexio | ||
| dSpace R2018-B | ||
| dSpace R2018-A | ||
| dSpace R2017-B | ||
| dSpace R2017-A | ||
| dSpace R2016-B | ||
| Vector Informatik | ||
| CANoe 12.0 4) | ||
| CANoe 11.0 5) | ||
| CANoe 10.0 6) | ||
| National Instruments 7) | ||
| NI VeriStand 2018 | ||
| ADTF | ||
| ADTF 2.x win64_vc100 7) | ||
| ADTF 2.x linux64 | ||
| ETAS | ||
| ETAS Labcar-Operator 5.4.4 | ||
| ETAS Labcar-Operator 5.4.3 | ||
| expleo (formerly Assystem) | ||
| Modular HiL / Messina | ||
| MicroNova | ||
| NovaCarts | ||
| MathWorks / Speedgoat | ||
| Simulink Real-Time | ||
| Opal-RT | ||
| Opal-RT RT-Lab | ||
| Concurrent | ||
| iHawk | ||
| iSyst | ||
| iSyTester | ||
Annotations
Expand the table with + for more details.
1) Accelerator, Rapid Accelerator mode and RSIM target build require a supported Microsoft Visual C/C++ Compiler (VS2010, Windows SDK v7.1, VS2015, VS2017) details in the Installation Guide
2) dSpace XiL API has to be installed
3) OpenDRIVE roads not supported on platform
4) Vector add-on Matlab Interface V6.1.2 required
5) Vector add-on Matlab Interface V5.0.7, V5.1.3 or V6.0.4 required
6) Vector add-on Matlab Interface V4.2.4 required
7) Only in combination with Microsoft Visual 2010 C/C++ Compiler (e.g. by installing the free Windows SDK v7.1, details in the Installation Guide)
Legend
| Supported off-the-shelf | |
| Supported on demand |
Weitere Informationen, Testlizenzen und Support
Weitere Informationen
- Engineering-Services für den virtuellen Fahrversuch
- Schulungen für DYNA4
Testlizenz anfordern
Susanne Beckert
Telefon +49 89 74 73 77-20
Kontakt per E-Mail
Produktsupport
Besuchen Sie die Support-Seite
Support von 9:00 bis 17:00 CET
Supportanfrage starten >>
Download-Link für Updates >>